|
A Guide to Implementing the Theory of
Constraints (TOC) |
|||||
|
Overcoming Obstacles The
pre-requisite tree ought to be considered the most important tree in the Thinking
Process suite. It is the tree that
allows us to overcome the obstacles that stop us from implementing our
plan. It is also the tree that in fact
becomes the implementation plan. And
it is the tree to which timelines, responsibilities, and accountabilities can
be assigned to. It is also the tree
that I have most often seen skimmed over. There
is an English saying that you can plan to fail, or you can fail to plan. The pre-requisite tree occupies the
position of “plan” amongst the Thinking Process tools. Skim it at your peril. In
developing the future reality tree and trimming any negative branches we are
really developing our solution, we tailor it to our specific
circumstance. Now we must deal with
the substantial reservations the “yes buts” that tell us there are still real
obstacles that block our progress.
After all if an injection to a future reality tree is simple enough we
would “just go out and do it,” and then we wouldn’t need to write a pre-requisite
tree for it. If we find we can’t just
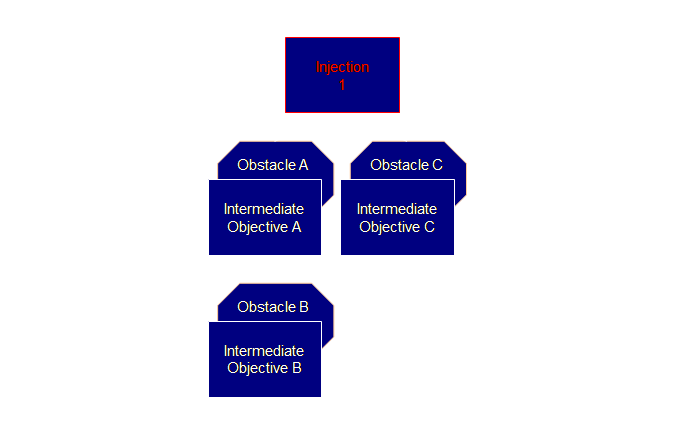
go and do it we need to stop and think for a while. The
pre-requisite tree is composed of two elements, an obstacle and an
intermediate objective. The
intermediate objective is the action that we must undertake to overcome the
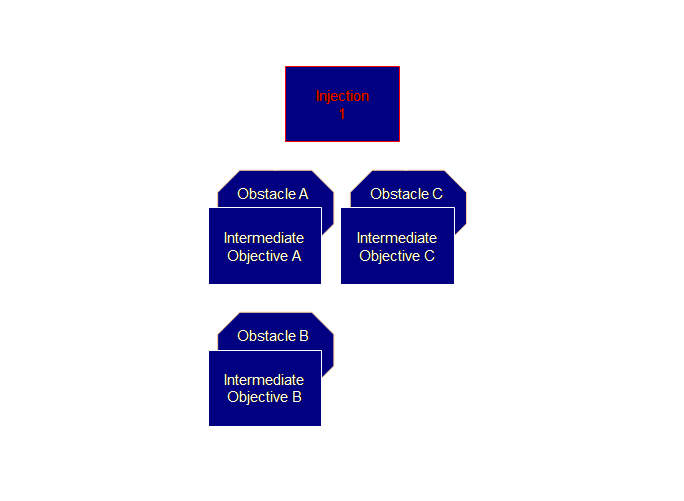
obstacle. There might be several
independent obstacles to an injection as in the example below (A and C), or
several dependant obstacles in a chain (A and B). The obstacles are either things that exist
now, which we must remove or overcome, or things that don’t exist now which
we must obtain.
How do
we build a pre-requisite tree? Below
is a brief description, more detailed descriptions are available in the
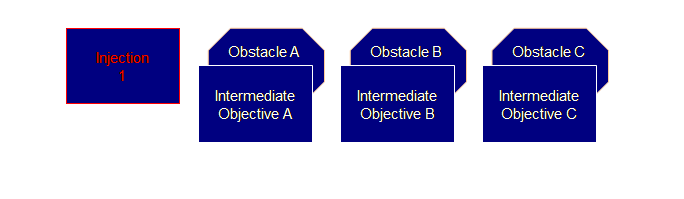
references (1-3). Firstly
we need to choose the injection to address and then solicit; all the
obstacles, and all the intermediate objectives that will overcome the
obstacles. Dettmer uses the Crawford
Slip method to great effect to solicit obstacles and intermediate objectives
for the pre-requisite tree (4, 5). So our
first step will look like this.
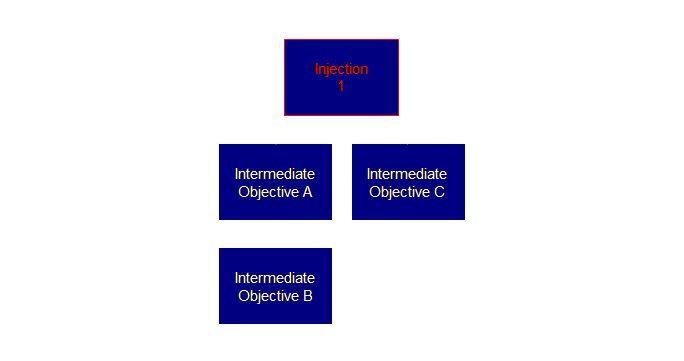
In fact
we really only need to know about the intermediate objectives – after all
they are the sequence of things that we are now going to do in order to
action our injection and make our future reality tree implementable. A short-hand way of displaying a pre-requisite
tree as intermediate objectives alone is called an intermediate objective map
or an IO map for short. Let’s
draw it.
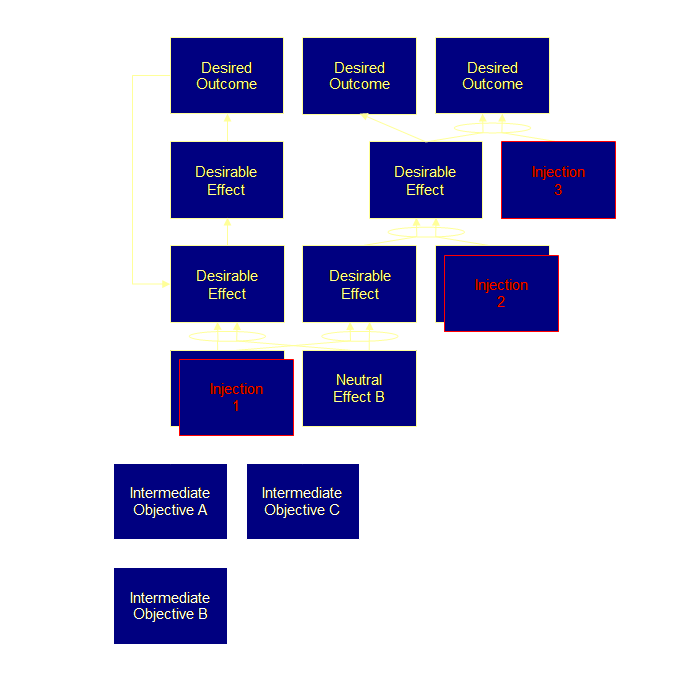
Let’s
put it all together. Let’s add the IO Map to our future reality tree. Remember we spoke of the Thinking Process
trees as being a kind of LEGO for business problems. We can “ slot” this short IO map into out
future reality tree example like a piece of a jigsaw and see at a glance what
the effect will be of completing each of the intermediate objectives and thus
the injection. Here
is the full picture.
(1) Dettmer, H. W., (1997) Goldratt’s Theory
of Constraints: a systems approach to continuous improvement. ASQC Quality Press, pp 236-281. (2) Dettmer, H. W., (1998) Breaking the
constraints to world class performance.
ASQ Quality Press, pp 169-188. (3) Scheinkopf, L., (1999) Thinking for a change: putting the TOC thinking processes to use. St Lucie Press/APICS series on constraint management, pp 193-217. (4) Dettmer, H. W., (2003) Strategic
navigation: a systems approach to business strategy. ASQ Quality Press, pp 91-93 & 215-228. (5) Dettmer, H. W., (2003) Brainpower
networking using the Crawford slip method.
Trafford Publishing, Inc., 181 pp. (6) Newbold, R. C., (1998) Project management
in the fast lane: applying the theory of constraints. St. Lucie Press, 284 pp This Webpage Copyright © 2003-2009 by Dr K. J. Youngman |