|
A Guide to Implementing the Theory of
Constraints (TOC) |
|||||
|
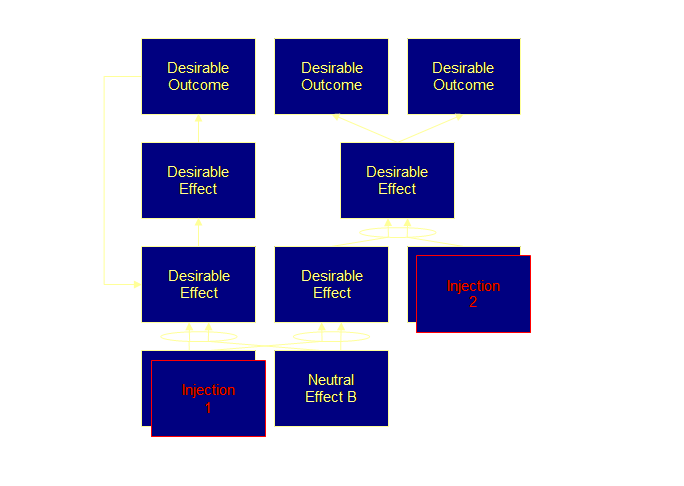
Future Expectations A future reality tree allows us to map out our future
expectations given that we will introduce something new into our reality –
the injection that we developed to break our current reality problem or core
conflict. A future reality tree lets
us test the future outcome using known cause and effect to check that what we
want is what we will get. This page is
a brief introduction, further information can be found in several published
texts (1-3). At its simplest, a future reality tree might be
thought of as a current reality with all the undesirable effects (UDE’s)
changed to desirable effects (DE’s).
Let’s draw that. In fact we
will rename the final entities as desirable outcomes.
The future reality tree is the tool of choice in
gaining understanding and agreement that the solution we have decided upon
will account for all of the undesirable effects that we currently experience
and built into our current reality tree. Just as a current reality tree isn’t a current
reality tree without at least one negative reinforcing loop, a future reality
tree should also have a positive reinforcing loop – a so-called virtuous
spiral. As things get better, they get
even better still. We should try to
engineer positive reinforcing loops into our future reality trees. It makes them more robust. In fact we are leveraging the situation in
a positive manner. For example just as
our young child had difficulty leaning to read because s/he wasn’t reading,
now as the child starts to read (desirable effect) s/he can read better
(desirable outcome) and then starts to read more and more often (positive
reinforcing loop). We read a future reality tree in the same way as a
current reality tree; if cause, then effect. While it is easiest to visualize a future reality
tree like this, most often the future reality tree will not have a near 1:1
mapping with the prior current reality tree, but will grow its own shape as
we engineer the solution. The important
point is to make sure all of the previous UDE’s are overcome. Moreover, we want to do this with the
greatest “bang for bucks.” If you find
that you are using lots of injections to force the desired solution, then
maybe the core problem wasn’t sufficiently uncovered in the prior analysis. For an explanation of how to construct an FRT from a core conflict and a cloud,
check here. Usually as we develop our future reality tree, we experience
the situation where our best intents give rise to one or more new negative
outcomes. Clearly we are not aiming to
introduce new problems. We call these
new but presently un-realized problems “negative branches.” And we must cut them out – prune them,
before we put our future reality tree into action. Let’s examine a simple negative branch example next. (1) Dettmer,
H. W., (1997) Goldratt’s Theory of Constraints: a systems approach to
continuous improvement. ASQC Quality
Press, pp 178-235. (2) Dettmer,
H. W., (1998) Breaking the constraints to world class performance. ASQ Quality Press, pp 131-156. (3)
Scheinkopf, L., (1999) Thinking for a change: putting the TOC thinking
processes to use. St Lucie Press/APICS series on constraint management, pp
109-141. This Webpage Copyright © 2003-2009 by Dr K. J.
Youngman |